| 你当前的位置:首页>>Inventor>>Inventor2008机械设计应用教程 |
| 基于装配关系的关联设计技巧(8) |
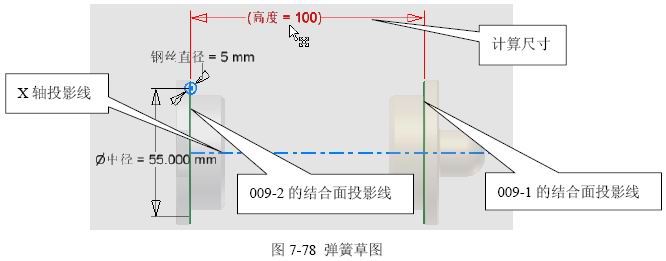
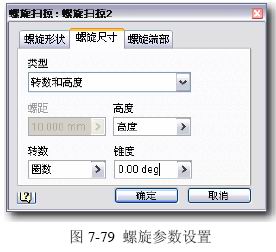
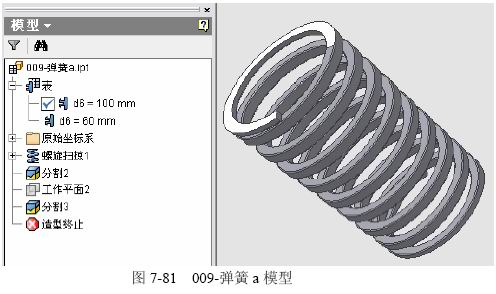
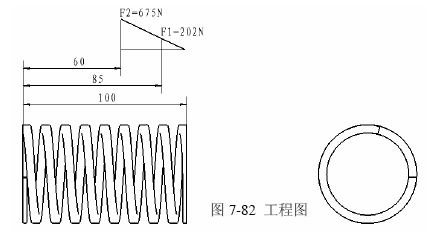
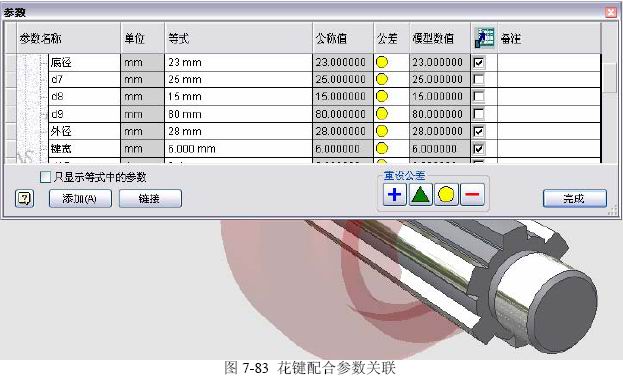
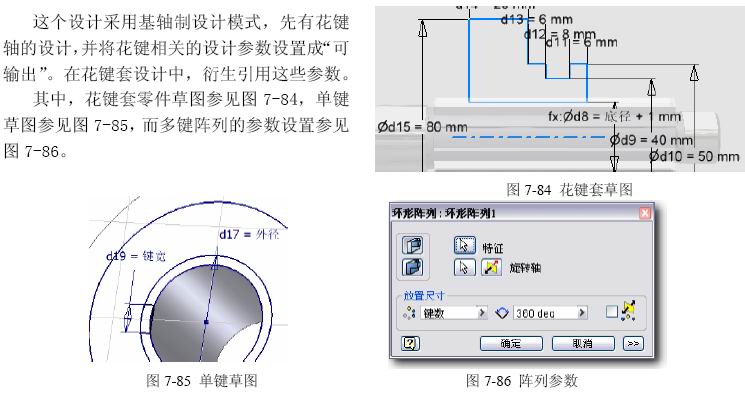
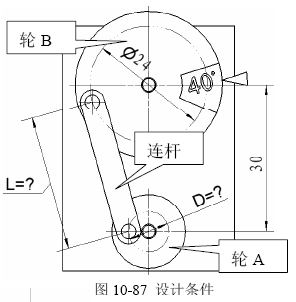
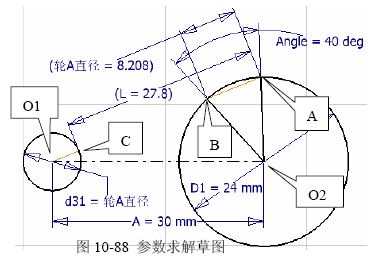
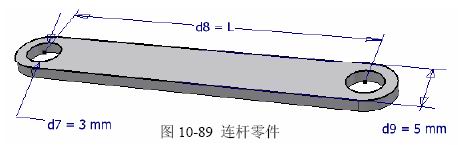
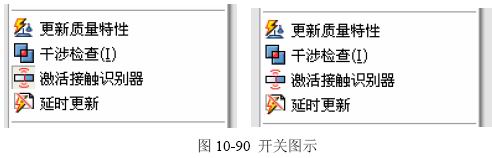
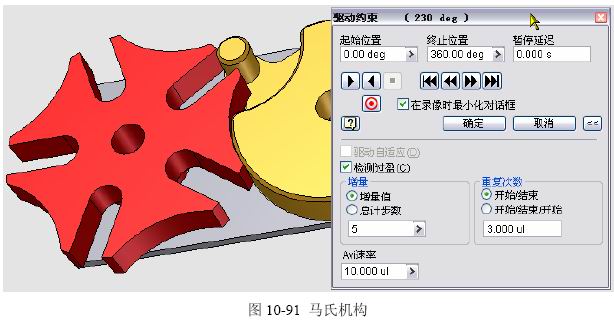
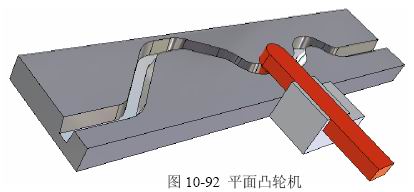
9.设计详解之六:弹簧相关 9.1 先建立装配模型 新建装配,装入009-1和009-2这两个与弹簧关联的零件,把它们的装配约束设置好。包括轴 线对准,与弹簧的接触面相距100mm,固定件009-1的X轴与装配环境的原始坐标系的X轴重合(这 是为弹簧的草图准备基面)。 9.2 基于装配关联建立弹簧草图 在位创建新零件(009-弹簧.IPT),在装配环境的原始坐标系的XY面上作草图,这就确保了弹 簧的几何位置与现有相关件的一个正确约束。 投影009-1和009-2上与未来弹簧接触的面得到两条线;标出我们需要的两线间距计算尺寸。 参见图7-78,最后得到计算尺寸并改名为“高度”。 投影弹簧零件的X轴,作为弹簧轴线;在两端投影线上接出两段共线的直线,这是为将来切割 弹簧端面用的草图线。其它的草图结构没什么特殊之处了。 9.3 创建弹簧特征 用“螺旋扫掠”完成,参数参见图7-79。其中,高度参 数必须引用前边草图中得到的计算尺寸,以实现动态数据关 联。因为在草图中使用了关联投影,这个螺旋特征将自动成 为“自适应”模式。 但是仍不能单独设置螺旋扫掠特征的自适应身份。 9.4 动作模拟 驱动009-1或009-2下属的“弹簧压缩”装配约束,可见动态的结果,结果参见009.WMV。 注意:Inventor会一边更新模型,一边做几何关系检查。 就是说,如果弹簧圈在压缩的过程中出现“嵌入其它圈”的情况,将报错(见图7-80上)。而Inventor会停止在这个位置上,这实际上是得到了“最大可能压缩”位置的结果,参见图7-80下的情况。 我们准备压缩到66mm;Inventor告诉我们,顶多到60mm的位置,再往下就不能保证弹簧的几 何模型正确性了… 9.5 点评―仅仅是为了看起来像 实际上,对于弹簧详细设计参数求解,是无法在Inventor中完成的,还是得沿用传统设计的方 法,查手册和进行必要的台架试验。即使用了某种分析软件,其结果仍然需要台架实验来最后验证 和确认,这是弹簧设计的无奈之处。 上边的过程,仅仅是一种“演示”,而不是设计。 说实在的,对设计需求来说这是个“花架子”。但是对于给客户看的机构演示,还是十分必要的 功能。这个例子也表现了“变量化”设计模式,是怎样把几何参数和工程条件联合求解的先进性能。 9.6 为装配和零件图准备弹簧模型 以这个圆柱压缩弹簧为例,装配状态常常是工作状态,也就是被压缩的状态,不需要动态模拟;而零件状态,则要考虑出零件图,按自由状态绘制。这样,就需要两种表达。 先按自由尺寸创建弹簧(009-弹簧a.IPT);将它做成iPart。弹簧高度直接用常量描述,有两 个,自由状态100mm和压缩状态60mm。参见图7-81。 以100mm高度存盘,用于创建这个文件的工程图,参见“009-弹簧a.IDW”和图7-82。而将来 的装配使用中,则使用60mm高度的模型,参见009a.IAM和009a.IDW。 这样,就完全解决了自由状态下的工程图创建与压缩状态下的装配使用的矛盾,而且是同一根弹簧的模型,改变弹簧零件模型的设计参数,工程图和装配模型将会自动跟随关联,完成相关设计表达的正确变化。 10. 设计详解之七:花键关联设计实例分析 利用花键轴的参数,创建花键套。参见010.IAM和图7-83。 从中可以清楚地看到,设计中是怎样引用在花键轴这个基础设计中所确定的、与花键套相关的 设计参数,因此完成了两个零件的设计数据关联使用。 这是一种典型的“参数化”设计模式,可靠而稳定,参见\010\花键套(参数).IPT。 在布尔运算用的过渡装配中,抑制掉花键轴上不需要的键顶倒角特征。参见\010\花键套(衍生).IPT 和010a.IAM。 11.设计详解:简单机构综合设计 参见图10-87,这就是要求的结果。工作原理: 轮A是主动轮,通过连杆与轮B连接。要求在轮A转轮B动一周,轮B将转过40°的角度。已知条件是中心距30mm, 轮B的偏心销孔在直径24mm的圆上。 要先求解连杆长度和轮A的偏心销孔的偏心距;之后 完成机构模型。设计要求: ◆用零件和装配尺寸保证40°角度; ◆力争最大的、对轮B的驱动力矩; 11.1 机构几何参数求解 参见12-Base.IPT中的草图“参数求解”和图10-88。 详细过程如下: ◆作直线O1-O2,尺寸确保设计要求的中心距; ◆在O2上的圆,直径24,确保轮B的偏心距; ◆作O2圆的半径线,两线夹角40°,确保设计要求的转角; ◆连接A、B点,呈直线,线长度就是轮A的直径; ◆约束A-B线指向O1点,这样,力的传递将取得最大的扭矩; ◆在O1点上做圆,直径引用已经求得的“轮A直径”参数; ◆作圆O1的半径线,并约束与A-B直线共线,标注C点到A点的距离,这是连杆孔中心距L。 结果模型参见12.IAM改变参数“Angle”,可见有一整套新的设计数据出现。这说明在Inventor中不仅是求解方便和精确,而且很容易就能解决设计参数的调整问题… 11.2 创建零件和装配 因为设计参数由12-Base.IPT携带,每个相关零件都应当衍生使用它的参数。例如连杆零件, 参见12-3.IPT和图10-89。 至于装配,则相当简单,仅仅是位置确定。通过轮A的转动驱动,检验结果说明是正确的参数。 12. 设计详解:接触集合相关技术 前边介绍了基本的概念,简单的例子参见014a.IAM,可见这个“步进机构”的动作模拟已经可 以实现了。这类相关零件不完全贴合,有分离又有接触的机械结构是比较常见的。下面将以具体的 设计实例,展开应用技巧。 需要注意,参见图10-90,因为Inventor 界面设计的问题,造成接触集合开关是在菜单中选择, 而打开(图左)和关闭(图右)的区别相当不明显,因此每次使用接触集合时应认真查看确认。 12.1 马式机构(平面槽轮) 设计背景:槽轮齿数5,中心距60mm,圆柱销直径10mm,这些条件由基础件014b-Base.IPT 在用户参数中携带。 结构就位装配完成,两个轮形零件之间没有任何装配关系。 参见014b.IAM。其中014b-2.IPT是主动零件,要拖动槽轮(014b-1.IPT)按大致正确的位置转 动一下,但不要有约束。见图10-91。驱动“转动驱动”约束,可见机构正确运行。 在这样的过程中,如果图示的避让凹槽结构产生了干涉,在驱动约束中使干涉检查有效,将会 计算结果并提示干涉;如果不添加主动件的角度驱动约束,用光标拖动主动件转动,Inventor 将能 够真实模拟出“卡住”的结果… 参见014c.IAM。 12.2 平面凸轮 设计背景:这是一种常见的机械结构,参见图10-92和014d.IAM。 为了能在使用中调整滚子和凸轮槽的侧向间隙,将它们设计成锥体和斜槽的配合,而不是圆柱 和直槽的配合,这是很常见的结果。 现在要进行机构动作模拟。但是,对于目前的Inventor装配功能,还不能约束锥体与槽壁曲面 的“相切”或者“过渡”约束… 解决方法:创建凸轮零件,并将槽子的参数设置成“可输出”的结果;创建滚子零件,衍生并 使用凸轮槽的参数约束滚子的尺寸,造成关联,并给出0.02mm的间隙;按设计要求,装配他们到一 起,并将滚子手工拖动,放在比较正确的位置上;设置相关零件为“接触集合”;驱动“主动驱动”, 不打开“检测过盈”开关。 12.3 点评 可见,对于用连续接触或者间断接触完成机构动作,Inventor现在已经能够顺利实现动作模拟。 但是,有一些“应当”完成的机构动作,还是不顺利。 例如,对于圆柱凸轮,即便是用样条线完成的凸轮槽,圆柱形滚子这样比较符合Inventor规则 的条件下,无论是相切约束、过渡约束还是接触集合,都不能顺利完成。打开014e.IAM可以验证。 这种真三维的机构运动,不同于前边的2维或者2.5维的机构运动,需要更复杂的计算处理才 能解决动作模拟。确切的解决方案在“运动仿真”模块中可以完成,请参考本书的第16章。 13. 趣味实例 模型在\011文件夹中。 这个例子,用“接触集合”也能完成,只是计算量增大,会比较慢;另外,如果齿形不精确, 又没有必要的齿侧隙,会像实际机构一样,也会被“卡住”。 笔者之所以将这些结果称之为“趣味实例”,是因为我们在没有CAD软件的时候做设计,就已经 知道所有的结果了,而Inventor能做出来的,要比我们知道的还要少些。上述结果,可以说是“看看热闹”而已。【本章相关文件下载 |
版权所有 民众工作室.制作 |