| 你当前的位置:首页>>Inventor>>Inventor2008机械设计应用教程 | 运动仿真(4) |
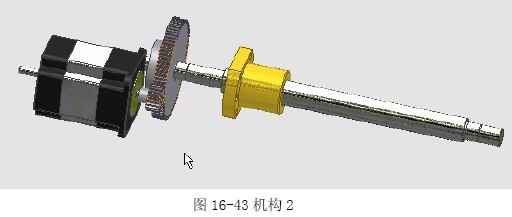
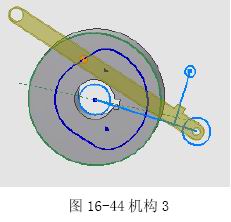
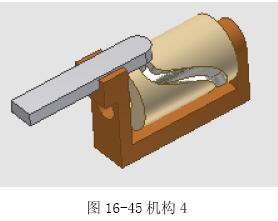
7.5 自由度选项卡-驱动 参见图16-36,可以驱动此约束作为原动力驱动整个机构运动.选择不同的参数(位置.速度、加速度)来驱动约束,并可以在图形区域设置这些参数的图形曲线。 8. 外部载荷(Force) 8.1 定义重力 运动仿真环境中,默认情况下是没有重力的。若要添加重力,需在 运动仿真的浏览器中,选择“外部载荷”目录下的“重力”,在右键菜 单中选择“定义重力”。参见图16-37。 选择了“定义重力”后,将弹出对话框,将“抑制”选项禁用,就可以定义重力了。参见图 16-38。定义重力有两种方式: ◆图元 选择“图元”后,图元区域可用。选择几何图元指定重力的方向,并输入重力的大小. ◆零部件 选择“零部件”后,零部件区域可用。Inventor会在模型中显示出一个坐标系,默认的情况下重力的方向沿Z轴正方向,用户可以通过在“零部件”区域输入值来改变重力的方向和大小. 8.2 添加力 在运动仿真工具面板中点击按钮,或是在运动仿真浏览器其中选择“外部载荷”,在右键 菜单中选择“添加力”,都可为模型添加作用力。 在“力”对话框中,可以选择图元指定力的位置。输入力的大小可以通过输入值的方法也可在图示器中设置。在“更多选项”中,还可以以分力的形式添加力。参见图16-40。 8.3 添加扭矩 在运动仿真工具面板中点击 “扭矩”对话框与“力”对话框极为相似,这里就不介绍了。参见图16-41。 9. 综合实例 9.1 实例1 如图16-42所示机构1,在装配环境中完成装 配后,进入到运动仿真环境,Inventor默认将装配约束全部转换成基本运动约束,因此在不需要 添加任何其他约束,机构在运动仿真中就能够运 动了。参见16-28.IAM. 1.打开装配文件16-28a.IAM,进入到运动仿真环境。为了方便添加运动约束,文件中没有添加任何装配约束。 2.为零件16-52与零件16-57添加“焊接连接”。 3.为零件16-53与零件16-57添加“旋转运动”。 4.为零件16-56与零件16-53添加“焊接连接”。 5.为零件16-53与零件16-54添加“旋转运动”。 6.为零件16-55与零件16-54添加“旋转运动”。 7.为零件16-55与零件16-52添加“线面运动”。 8.设置n。2旋转运动的驱动。 9.在仿真面板中点击播放。 详细的操作过程见001.AVI. 9.2 实例2 如图16-43所示机构2,由电机带动小齿轮转动,大齿轮带动丝杠转动,从而使丝杠螺母向前 移动。在装配环境下完成装配后,进入运动仿真环境。Inventor自动将装配约束转换成基本运动约 束。但需要添加外齿轮啮合运动和螺旋运动。具体的操作过程参见002.AVI,结果见16-29c.IAM. 9.3 实例3 如图16-44所示机构3,这是一个简化的凸轮槽机构,图中的 曲线代表凸轮槽。杆的一点将在凸轮槽内运动。这个机构可以用 圆槽-滚子运动来定义。在这里我们将使用二维接触和弹簧运动来完成这个运动。具体的操作过程参见003.AVI。 在视频文件中,先使用圆槽滚子运动来定义机构的运动。接 着将圆槽滚子运动约束删除,然后加上了“二维接触”约束。在 添加“弹簧”约束之前,先对机构做了运动演示,读者可以看出 在没有“弹簧”约束时,机构的运动是达不到预期的效果的,由此可以看出“弹簧”约束的作用。结果参见16-30.IAM。 9.4 实例4 在播放时,由于程序计算量比较大,因此机构运动的比较慢。但生成动画后机构运动的会很流畅。参见文件16-31\014e.AVI。 详细的操作过程见004.AVI。 |
版权所有 民众工作室.制作 |
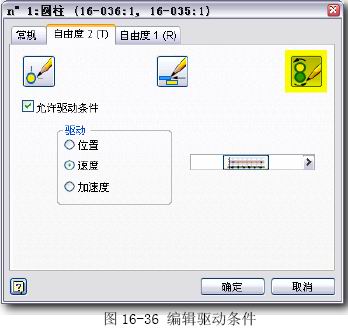
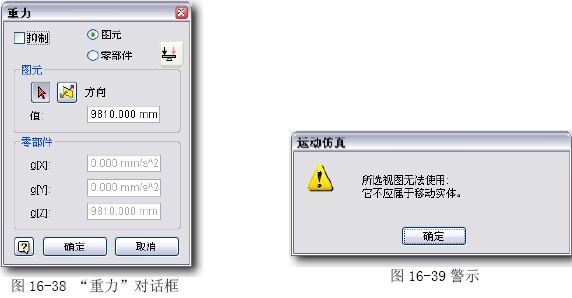

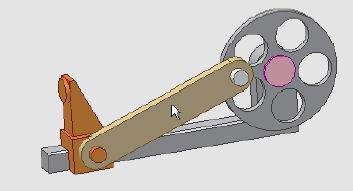 图16-42 机构1
图16-42 机构1