| 你当前的位置:首页>>Inventor>>Inventor2008机械设计应用教程 | 运动仿真(3) |
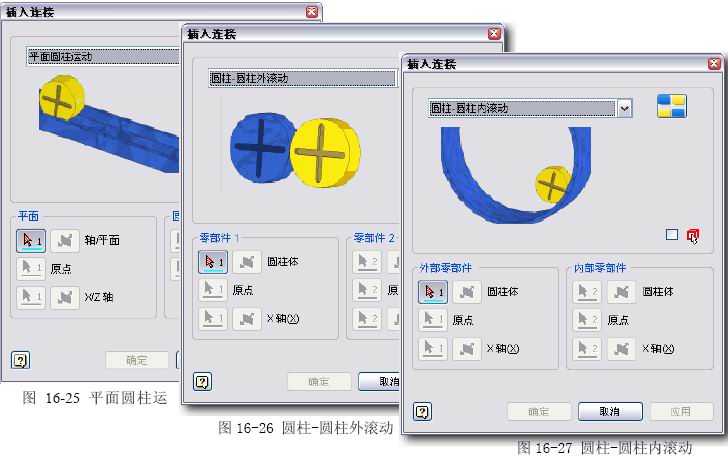
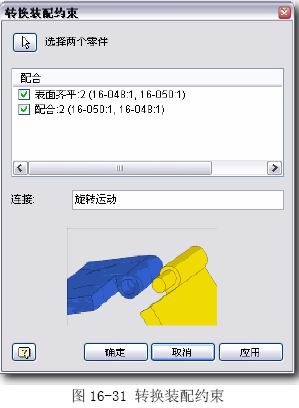
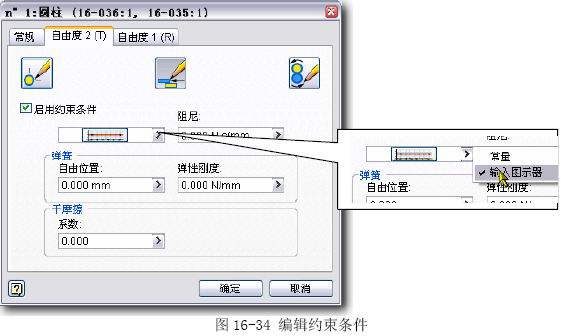
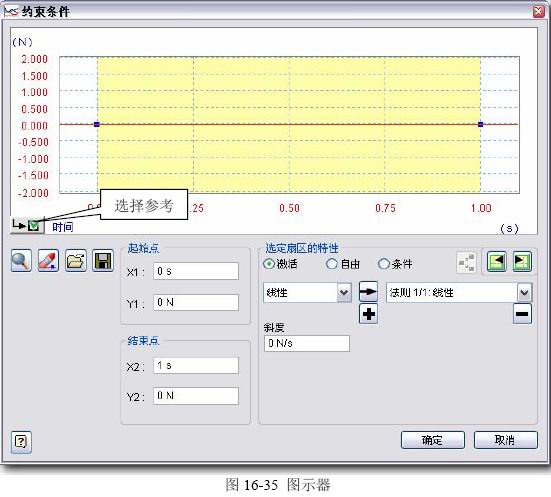
4.11 平面圆柱运动(Sl Cylinder on Plane) 参见图16-25、16-21.IAM,与齿轮齿条运动(RLCylinderonPlane)类似,仅不计算两者的强制滚动关系。 其中,名称前缀Sl是Sliding(滑动)的意思。 4.12 圆柱-圆柱外滚动(SlCylinderonCylinder) 参见图16-26、16-22.IAM,与齿轮外啮合运动(RLCylinder onCylinder)类似,仅不计算两者的 滚动关系。可见,无论是原文还是实际结果,都没有“滚”的含义。 4.13 圆柱-圆柱外滚动(SlCylinderinCylinder) 参见图16-27、16-23.IAM,与齿轮齿条运动(RLCylinderinCylinder)类似,仅不计算两者的滚动关系… 4.14 凸轮滚子运动(SlCylinder Curve) 参见“4.4凸轮滚子运动”的说明。参见 16-24.IAM。 4.15 圆槽滚子运动(SlPointCurve) 参见图16-28,实际上是“点在曲线上”的约束, 与槽和滚子无关。参见16-25.IAM。 ◆约束特点: 目前非常遗憾,不支持急迫需要的、对于三维封 闭曲线的支持。所以实际上这还是个二维的功能…参见12-25a.IAM。 ◆与Inventor的装配约束相关: 5. 其他 5.1 弹簧、阻尼和千斤顶(Spring/Damper/Jack) 在选定的两个点之间,添加弹簧类原始条件。参见图16-29。 5.2 接触集合(3DContact) 与Inventor的接触集合类似,参见图16-30、16-26.IAM。但不能将Inventor的接触集合转 换成这种。 接触几何表现的并不是很好,例11-27.IAM,将不能够做出符合实际的结果。 6. 转换Inventor的装配约束(ConvertAssemblyConstraints) 虽然表面上两者在一个环境下,但是从界面到操作 风格、从基本概念到相互转化,两者有着很大的区别。一些常用的装配约束可以被运动仿真识别,也有不少不能识别。 Inventor默认情况下会自动将能够转换的装配约束 转换成运动约束。如果将“运动仿真设置”中的“自动更新已转换的连接”项禁用,就可以自己手动转换装配约束。 进入运动仿真环境,启用 如果仿真模块不能识别这个约束,将弹出消息框说明结果。因为Inventor、运动仿真和我们,在同一个事物上的概念都有区别,这种不能转换的情形也就可以理解了… 7. 约束的驱动和设置 所有的运动约束都可以被驱动。 7.1 机构原动力问题 7.2 常规选项卡 在运动仿真中,很多地方出现了很多“铰链”一词,这是翻译的错误,应该是约束或者连接。打开此开关,这个运动约束将被抑制,否则不抑制。 ◆锁定自由度: 关闭此开关,这个运动未被约束的自由度有效,否则将会锁定全部自由度。 ◆类型: 将显示连接类型名称。 ◆显示: 外力作用下(如果已经添加),机构瞬间力以所依附零件的参考坐标系为基准、呈矢量显示. 7.3 自由度选项卡-初始条件 运动约束的剩余自由度,会有同样多个数量的 “自由度xxx”选项卡出现。每个这类选项卡中,都有“编辑初始条件”的功能。见图16-33。 ◆名称和表达 在选项卡名称中,会有T或者R的注释,其中 T是移动、而R是转动。选定了某选项卡,在图形 窗口会有相关的标记被显示。但是不太醒目,可以在“运动仿真设置”功能中,将“三轴架”-“Z 轴大”的参数加大。 ◆位置 初始位置参数,默认的是当前的值,可以对其 进行调整,造成不同的相对位置关系。可见,剩余自由度实际上也并非完全自由,也可以设置条件。如果“锁定”,这个剩余自由度将被闲置,可能造成机构不能长长运动的结果。 ◆速度 如果禁用“已计算”,则需要给定速度。如果给定,这个剩余自由度将具有原动力的能力。对于旋转,单位为弧度/秒;对于平移,则为毫米/秒。 ◆边界 为运动计算设置“刚度”、“阻尼”和“位置”值。其中“最小值”和“最大值”设置要检查的边界极限。 7.4 自由度选项卡-约束 ◆启用约束条件 参见图16-34,根据这个自由度的性质,建立连接约束中的相关条件,否则成为无条件的自由 度。 ◆力和扭矩的常量输入 参见图16-34右侧,所指位置可以展开成两种输入方式:“常量”,就是输入力或者扭矩的数值,而单位已经列出了。 ◆力和扭矩的图形输入 对于“输入图示器”,则弹出图16-35的界面。这是个十分复杂的界面。其中: 点击“选择参考”按钮(比较隐蔽),展开现有条件浏览器,为图形输入准备参考变量。选中图形的特定区域后,该区域将以黄色显示。根据需要设定点。在图形或要添加、删除、锁定、解锁 的点上单击鼠标右键。
|
版权所有 民众工作室.制作 |