| 你当前的位置:首页>>Inventor>>Inventor2008机械设计应用教程 | 运动仿真(1) |
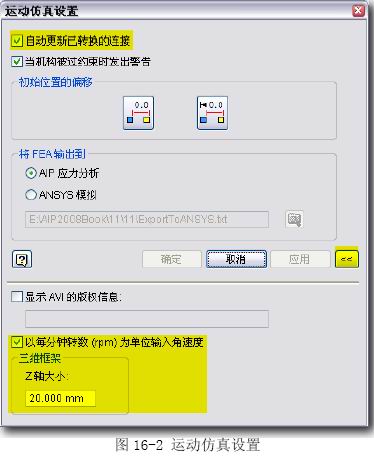
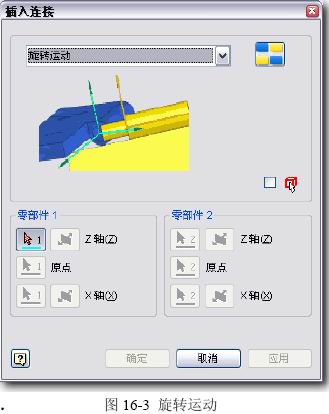
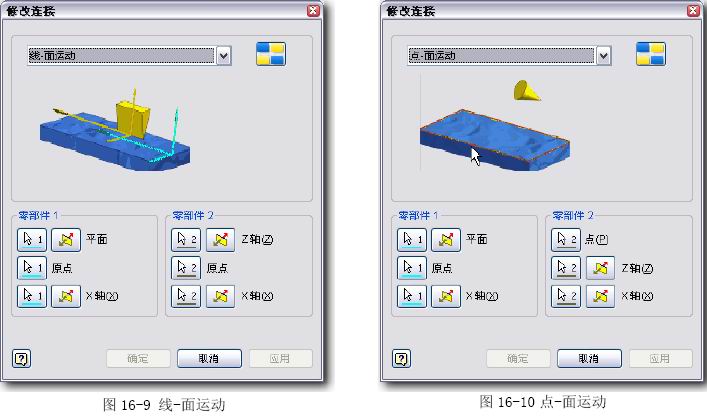
| 第16章 运动仿真 1.基本情况 InventorProfessional运动仿真,能够完成装配下的零部件运动和载荷条件下的动态仿真。也可以在任何运动状态下将载荷条件输出到应力分析中;能展示运动过程以及某瞬间的动态载荷。运动仿真处理仅在装配环境下使用,包括: ◆可引用运动连接约束库,实施多于Inventor自身装配约束的约束。 ◆可定义外力和力矩。 ◆可根据与时间相关的位置、速度、加速度、扭矩以及外载荷等工况,实施运动仿真。 ◆可创建运动轨迹,表达运动结果。 ◆可将结果数据输出成图表或者Excel表。 ◆可将运动瞬间的工况结果传递到应力分析模块或ANSYS Workbench。 ◆可解析运动中力平衡所产生的条件力。 ◆可将Inventor装配约束中符合条件的设置,转换成运动仿真中对应的连接约束。 ◆可在定义运动连接时,使用与时间相关的摩擦、阻尼、弹簧等条件。 ◆交互使用动态零件运动将动力应用于连接仿真。 ◆只能在Inventor装配环境进行操作。 ◆使用与每个零件关联的物理特性。 ◆浏览器中抑制或未激活的零件处于“空闲”状态,不能参与仿真。 ◆原始坐标系原点与仿真坐标系原点重合。 ◆默认情况下,零件之间没有运动连接。 ◆因为零件是刚体,且在连接中处于空闲状态,所以可以对机械装置进行过约束。例如,如果指定约束一个自由度,而该自由度已经受 到另一个现有连接的约束。 进入Inventor运动仿真模块需作如下操作:打开一个需要进行运动仿真 的装配文件,在“应用程序”菜单下选择“运动仿真”,即可进入Inventor运动仿真界面。参见图16-1所示。 2. 基础参数 在切换到运动仿真环境中之后,一般要设置一些基础参数。先点击工具面板上的 当“自动更新已转换的连接”处于激活状态时,Inventor会在进入运动仿真模块后,自动把装配约束转换为标准连接,但同时用户也不能再添加标准连接了,也就是不能添加后面所讲的“基本 运动约束”。如果通过清除该框来禁用“自动更新已转换的连接”,系统会显示一条消息警告用户将删除所有已转换的连接,此后用户可以添加标准连接,如果有装配约束,也可以通过“转换装配约 束”手动转换装配约束。 点击 “三维框架”的“Z轴大小”是用来设置三轴架在图形区中的显示大小,一般设置成20比较 合适。在条件设置中,这个三轴架是个很重要的参考,其中有绿色和黄色两套,分别代表未来操控中经常见到的蓝色和黄色零件;三轴架上,一个箭头是X方向,两个和三个箭头是Y和Z 方向。 3. 基本运动约束 在运动仿真中,Inventor默认情况下会自动将 装配中的约束转换成基本运动约束,但却不能再添加基本运动约束。因此读者在看这节时,可以把运动仿 真设置中的“自动更新已转换的连接”禁用,这样就可以手动添加基本运动约束。 3.1 旋转运动(Revolution) 参见图16-3,参见16-01C.IAM。其中: ◆约束特点: 名称:旋转;被约束的自由度数:5;约束要素: Z1=Z2O1=O2 ◆Z轴: 指定这个零件运动坐标系的Z轴。可以是工作 轴,也可以是任何可能确定一根轴的几何结构;例如:圆柱面、圆锥面等… ◆原点: 在选定Z轴之后,指定这个零件运动坐标系的原点位置。任何与Z轴不平行的平面或者可以定义一个点的几何要素都可用;例如:端面、平面、圆弧棱边… ◆X轴: 这不是旋转运动约束的必要条件,而是控制剩余自由度,两零件初始位置的条件,后来会用到这个条件完成旋转运动的驱动设置… ◆与Inventor的装配约束相关: 插入,以及轴线+端面对准,可直接被继承为“旋转”。 3.2 平移运动(Prismatic) 参见图16-4,其中的图标按钮操作规则与旋转运动雷同。与通常的“平移”有所不同的是: 这里所说的平移,将是沿着所指定Z轴方向的直线运 动,并非统称意义上的“在平面上作运动、包括可能 的沿着曲线运动”;所以,精确的描述应当是“沿直线平移”。参见16-02c.IAM。 ◆约束特点: 名称:平移;被约束的自由度数:5;约束要素:X1Y1Z1=X2Y2Z2(坐标轴方向相同),O2落在O1Z1线上 ◆Z轴: 指定零件运动的直线轨迹位置的Z轴。可以是工 作轴,也可以是任何可能确定一根轴的几何结构;例如:圆柱面、圆锥面等… ◆原点: 在选定Z轴之后,指定这个零件运动坐标系的原 点位置。任何与Z轴不平行的平面或者可以定义一个点的几何要素都可用;例如:端面、平面、圆弧棱边… ◆X轴: 这不是平移运动约束的必要条件,而是控制剩余 自由度,两零件初始位置转角条件… ◆与Inventor的装配约束相关: 对于16-02.IAM这样的情况,就不容易直接使用运动关系了,因为不可能直接找到Z轴… 两个不平行的端面对准可以转换成平移运动。3.3 圆柱运动(Cylindrical) 参见图16-5。 ◆约束特点: 名称:圆柱运动;被约束的自由度数:4;约束要素:Z1=Z2 ◆Z轴: 指定这个零件运动坐标系的Z 轴。可以是工作 轴,也可以是任何可能确定一根轴的几何结构;例如:圆柱面、圆锥面甚至是棱边… ◆原点: 在选定Z轴之后,指定这个零件运动坐标系的原 点位置,这不是圆柱运动约束的必要条件。 ◆X轴: 这不是圆柱运动约束的必要条件,而是控制剩余 自由度,两零件初始位置转角条件… ◆与Inventor的装配约束相关: 参见16-03.IAM这样的情况,利用“线-线重合” 的约束结果,可以被解释成圆柱运动。 3.4 球面运动(Spherical) 参见图16-6。 ◆约束特点: 名称:平移;被约束的自由度数:3;约束要素:O1=O2 可见,球面运动比柱面运动又减少一个自由度的约束。 ◆点: 两者的约束点。 ◆Z轴/X轴: 这不是球面运动约束的必要条件,而是控制剩余自由度… ◆与Inventor的装配约束相关: 参见16-04.IAM这样的情况,利用“点-点重合”的约束结果,可以被解释成球面运动;至于 到底是不是有“球面”介入并无关系… 3.5 平面运动(Planar) 参见图16-7。 ◆约束特点: 名称:平面运动;被约束的自由度数:3;约束要素:Y1=Y2和O2落在O1X1Z1面上,这是典型的平动,包括移动和转动。实际上只有选定的两个平面的贴合。 ◆平面: 两者的贴合平面。 ◆原点/X轴: 这不是平面运动约束的必要条件,而是控制剩余 自由度… ◆与Inventor的装配约束相关: 参见16-05.IAM,利用“面-面贴合”的约束结 果,可以被解释成平面运动。 3.6 点-线运动(Point-Line) 参见图16-8。 ◆约束特点: 名称:点-线运动;被约束的自由度数:2;约束要素:O2落在O1Z1线上 即一个“点”沿着一条“直线”平动。 ◆Z轴/点: 两者运动的直线路径和装配到线的点。 ◆其他: 这不是运动约束的必要条件,而是控制剩余自由度… ◆与Inventor的装配约束相关: 参见16-06.IAM,在Inventor中利用“点-线”的装配约束结果同样具有这种特性。 3.7 线面运动(Line-Plane) 参见图16-9。 ◆约束特点: 名称:线-面运动;被约束的自由度数:2;约束要素:O2Z2落在O1X1Z1面上. 零件上的一条直线,落在另一个零件的平面上平动。 ◆平面/Z轴: 两者运动的贴合面和贴在面上的直线。 ◆其他: 这不是运动约束的必要条件,而是控制剩余自由度… ◆与Inventor的装配约束相关: 参见16-07.IAM,在Inventor中利用“面-线”的装配约束同样具有这种特性,可以被解释为 线面运动。 3.8 点面运动(Point-Plane) 参见图16-10。 ◆约束特点: 名称:点-面运动;被约束的自由度数:1;约束要素:O2落在面O1X1Z1上。 零件上的一个点,落在另一个零件的平面上平动。 ◆平面/Z轴: 两者运动的贴合面和贴在面上的直线。 ◆其他: 这不是运动约束的必要条件,而是控制剩余自由度… ◆与Inventor的装配约束相关: 参见16-08.IAM,目前在Inventor中利用“点在面上”的约束结果虽然同样具有这种特性, 可以被解释成点-面运动。 |
版权所有 民众工作室.制作 |