| 你当前的位置:首页>>Inventor>>Inventor2008机械设计应用教程 | 运动仿真(2) |
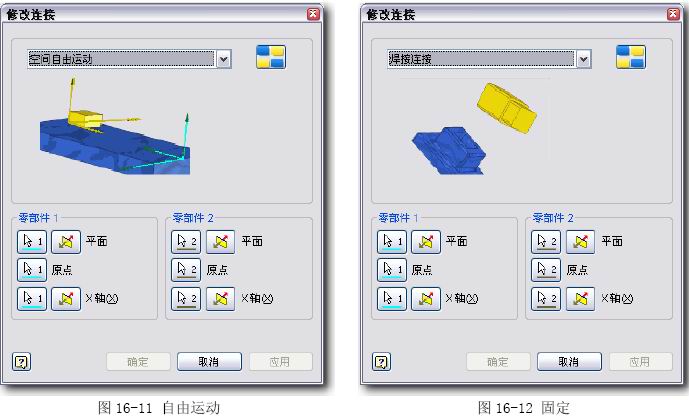
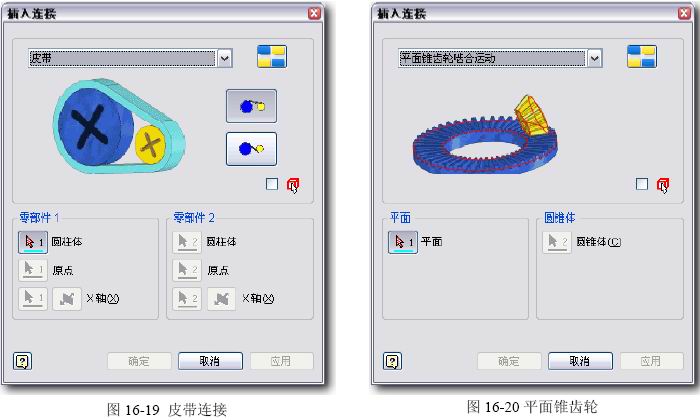
3.9 自由运动(Spatial) 参见图16-11。 ◆约束特点: 名称:空间自由运动;被约束的自由度数:0;约束要素:无 零件间没有约束。 ◆实体: 选择相对没有任何约束的两个零件。 ◆其他: 这不是运动约束的必要条件,而是控制剩余自由度… ◆与Inventor的装配约束相关: 参见16-09.IAM,目前在Inventor中没有这种装配约束。只能在仿真中添加… 3.10 固定(Welding) 参见图16-12。 ◆约束特点: 名称:焊接;被约束的自由度数:6;约束要素:O1X1Y1Z1=O2X2Y2Z2(坐标系重合) 零件间完全固定而不可相对运动。参见16-10.IAM, ◆与Inventor的装配约束相关: 在Inventor中的全约束装配,在运动仿真中被解释为“焊接”。 4. 机构运动约束 4.1 齿轮齿条(RlCylinderonPlane) 实际上是在添加“一个圆柱沿着一条直线/一个圆沿着一个平面/一个圆柱沿着一个平面滚动” 的运动约束;可以理解为齿轮的节圆与齿条节线之间的运动关系,并不要求一定是齿轮齿条构造。 参见16-11.IAM和图16-13。 ◆约束特点: 必须有一个运动约束确定两者的基本位置,例如例子中的“平面运动”;大多数情况下需要使用“滚动+相切”的方式,否则另加相切约束。 其中,名字前缀Rl是Rolling(滚动)的意思。 ◆与Inventor的装配约束相关: 不能继承Inventor中“运动约束”下的“转动-平动”装配约束,虽然两者应当是完全对应的。否则出现图16-14的提示。所以,只好在运动仿真中重新添加。 4.2 外齿轮(RlCylinderonCylinder) 实际上是在添加“一个圆柱沿着另一个圆柱(或者 圆)滚动”的运动约束;可以理解为两个齿轮的节圆外 切的运动关系,并不要求一定是齿轮构造。参见16-12.IAM和图16-15。 ◆约束特点: 必须有一个运动约束确定两者的基本位置,例如例 子中的中心距草图;大多数情况下需要使用“滚动+相切”的方式,否则另加相切约束。 ◆与Inventor的装配约束相关: 不能继承Inventor中“运动约束”下的“转动”装 配约束,虽然两者应当是完全对应的。所以,只好在运动仿真中重新添加。 4.3 内齿轮(RlCylinderinCylinder) 实际上是在添加“一个圆柱沿着另一个圆柱(或者 圆)滚动”的运动约束;但不能理解为内齿轮啮合运动, 它仅仅是内圆柱在外圆柱内滚动,而外圆柱不会运动。 可以参见图16-16上的示意图与16-13.IAM。 因此这个所谓的内齿轮啮合运动并非是用户所需要的,可以这么说在Inventor运动仿真不能 够添加内齿轮啮合的运动约束。而这点却可以在装配环境下做到,用户可以使用“转动”约束来模拟内齿轮啮合的运动,而且可以指定传动比。 ◆约束特点: 必须使外部零件不能够平面移动(转动或固定),而内部零件可以平面移动,这时候就可以添加这个运动约束。 ◆与Inventor的装配约束相关: 不能继承Inventor中“运动约束”下的“转动-相切”装配约束,所以,只好在运动仿真中 重新添加。 4.4 凸轮滚子运动(RlCylinderCurve) 平面凸轮-圆柱滚子,这应当很容易理解。在后面的连接中也有一个凸轮-滚子运动。这两者的区别在于前者的滚子是可以转动的,而后者滚子是不能转动的。严格的说后者根本没有滚子,只是杆的末端是圆弧面,在运动仿真中,前者属于滚动连接,后者属于滑动连接。参见图16-17、图16-18和16-14.IAM。 ◆约束特点: 必须有一个运动约束确定两者的基本位置。例如例子中的中心距草图。 ◆与Inventor的装配约束相关: 不能继承Inventor中“过渡”,虽然两者应当是对应的。所以,只好在运动仿真中重新添加。 4.5 皮带运动(Belt) 平皮带类似的传动关系,参见图16-19及16-15.IAM。很容易理解和使用。 ◆约束特点: 注意:其中“同向”和“交叉”是设置皮带的连接状态。 必须有一个运动约束确定两者的基本位置。例如例子中的中心距草图。 ◆与Inventor的装配约束相关: 不能继承Inventor中“运动”-“转动”,虽然与这里的结果应当是完全对应的。只好在运动仿真中重新添加。 4.6 平面锥齿轮啮合(RlConeonPlane) 实际上是“圆锥在平面上滚动”的关系,参见图20。 ◆约束特点: 尚未成功,总是不能自已完成两者相切的约束,又不能继承Inventor中的相切。 ◆与Inventor的装配约束相关: 不能继承Inventor中的同类装配约束。参见16-16.IAM。 4.7 锥齿轮外啮合(RlConeonCone) 实际上是“圆锥在圆锥上外切并滚动”的关系,参见图16-21和16-17.IAM。 ◆约束特点: 选定圆锥体的时候,“反向”按钮可以确定大端或者小端,两者都应当用大端。其他的必要位置与运动约束,需要另外添加。 ◆与Inventor的装配约束相关: 不能继承Inventor中的同类装配约束。 4.8 锥齿轮内啮合(RlConeinCone) 实际上是“圆锥在圆锥上内切并滚动”的关系,参见图16-22和16-18.IAM。 ◆约束特点: 要添加锥齿轮内啮合,必须先给两个圆锥添加旋转运动约束。选定圆锥体的时候,“反向”按钮可以确定大端或者小端,两者都应当用大端。 ◆与Inventor的装配约束相关: 不能继承Inventor中的同类装配约束。 4.9 螺旋运动(Screw) 很容易理解和使用。见图16-23。不需要零件上真的有螺纹结构。 ◆约束特点: 在添加螺纹运动约束之前,必须要有圆柱运动约束。 ◆与Inventor的装配约束相关: 不能继承Inventor中的同类的组合装配约束。参见16-19.IAM,并驱动“主动转动”约束。 4.10 蜗轮副运动(WormGear) 很容易理解和使用。见图16-24。不需要零件上真的有轮齿结构。 约束特点: “螺距(Pitch)”并不是蜗轮副运动的主要参数,但其确实表示的是单头蜗杆的螺距。改变这个值可以改变蜗轮蜗杆的速比。 ◆与Inventor的装配约束相关: 不能继承Inventor中的同类的组合装配约束。参见16-20.IAM,驱动“蜗杆转动”约束。 |
版权所有 民众工作室.制作 |