| 你当前的位置:首页>>Inventor>>提高篇 |
|
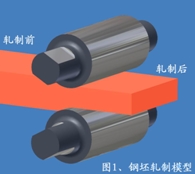
在Inventor中实现变形体的模拟-1 1、变形体模型的建立 由于Inventor中的运动模拟均是通过约束驱动实现的,而约束又是建立在设备中各零部件的之间的装配关系,所以驱动的结果只能是零部件的刚体运动。为了实现物体的变形,我们采用了多零件重合运动的方法,其原理是:将物体的原形及变形过程中的各变形体分别建模,然后将其重叠为一体(当然,应关闭轮廓显示),利用Inventor提供的函数,分别设置重叠体中各变形体的运动轨迹以实现变形的模拟。
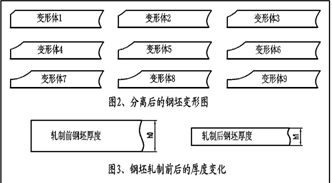
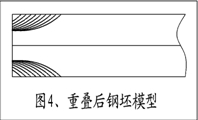
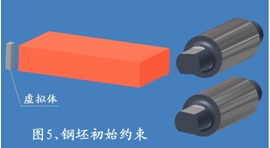
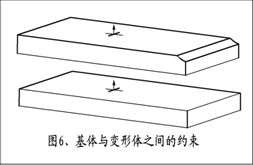
本例中,钢坯通过轧辊后的变形是由厚变薄,并且钢坯在厚度方向上的变形是上下对称的,根据轧制速度及钢坯咬入情况,我们将钢坯分成多个变形体(如图2所示),从图中看到,经过第9个变形体后,钢坯的咬入过程就已完成,所以,我们通过前9个变形体的运动分析,就可以了解实现变形模拟的过程,因为钢坯的变形是上下对称的,所以在合成钢坯中,每个变形体为两块(上下各一块) ,前9个变形体重叠后如图3所示。第10个及以后的变形体的重叠方法以此类推。 2、约束的设定 在整个变形过程中,我们以变形后的钢坯模型为基体,各变形体在运动过程中分时段与基体重合,就可达到变形的效果。因此,各变形体的位置约束均以基体为基准,同时,在轧制过程中,基体也在移动,故我们建立了一个固定的虚拟体(可设为不可见体)作为钢坯运动的参照(如图5所示),轧辊的转动速度及基变形体的移动秩序均可以通过基体的移动来确定。
|
版权所有 民众工作室.制作 |